|
|
|
My Research
interests are:
|
|
|
|
Optical Markerless Motion Capture and Pose
Estimation
2D-3D Pose Estimation
Real-Time
Tracking
and Multidisplay Rendering
Augmentation (AR),
Panoramas and Real-Time Graphics
|
|
|
|
Articulated ICP from
Stereo Images (see PhD thesis)
To apply the developed pose
estimation algorithm, correspondences between observed 3D points
and 3D model points are necessary. As the
observed points are calculated from depth maps, these correspondences
are not known.
Similar to other tracking systems an Iterative Closest Point (ICP)
approach is taken. For each
observed point, the nearest point on the model is assumed to be the
corresponding one. With these
correspondences the body pose of the model is calculated.
The following steps are repeated multiple times for each frame of a
sequence. The larger the relative motion is, the more correspondences
will be
incorrect. The principle idea of ICP is, that an estimated relative
motion decreases the
difference between model and observation, such that more
correspondences are correct, if built again for the smaller difference
in the next iteration.
The steps in one ICP iteration are:
a Render model in
current pose with a unique color for each triangle (OpenSG).
b Find visible
model points by analyzing the color of rendered image pixels.
c Build
correspondences from the depth map by finding nearest model point.
d Estimate relative
motion from 3D-point-3D-point correspondences by Nonlinear
Least Squares.
|
|
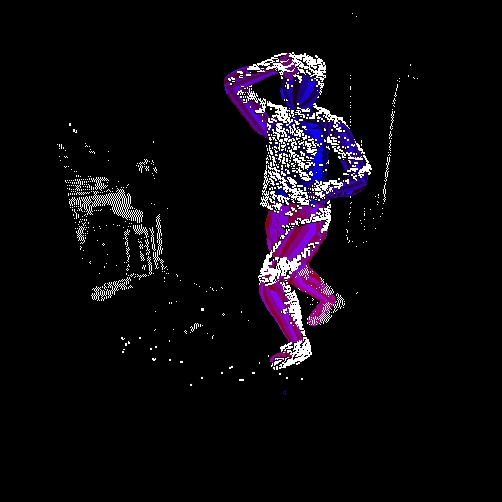 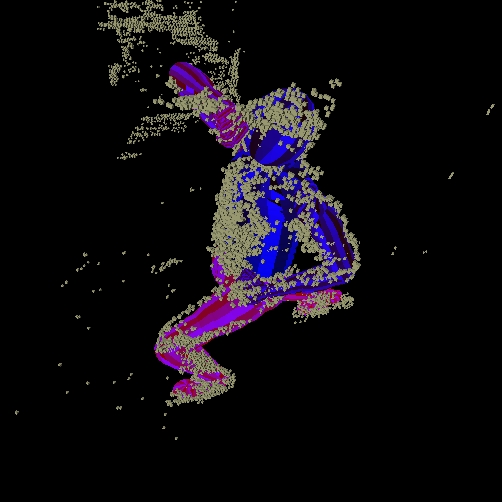
Two
views on the stereo input data(white boxes) for one image frame.
The articulated ICP estimates joint angles, such the surface
of the human model is fitting as close as possible to the input data.
Correspondences are found by using the closest model point for each
input point.
Video(17MB wmv): The
resulting sequence (24 DOF).
|
|
Human
Models
There
are a lot of different human models with different movement
capabilities, where usually each one is designed for a spcecific case.
Though no commonly used standard of human animation models exists, the
MPEG group defines a rather general model in the
MPEG-4 specification , which is basically the H-Anim body
specification. The H-Anim model is the basis for my work and gives
the opportunity to use MPEG4-BAP-files (Body Animation Parameter) for
animating characters.
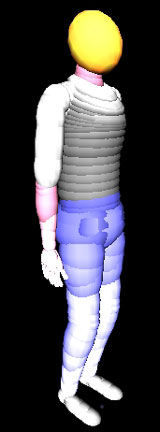
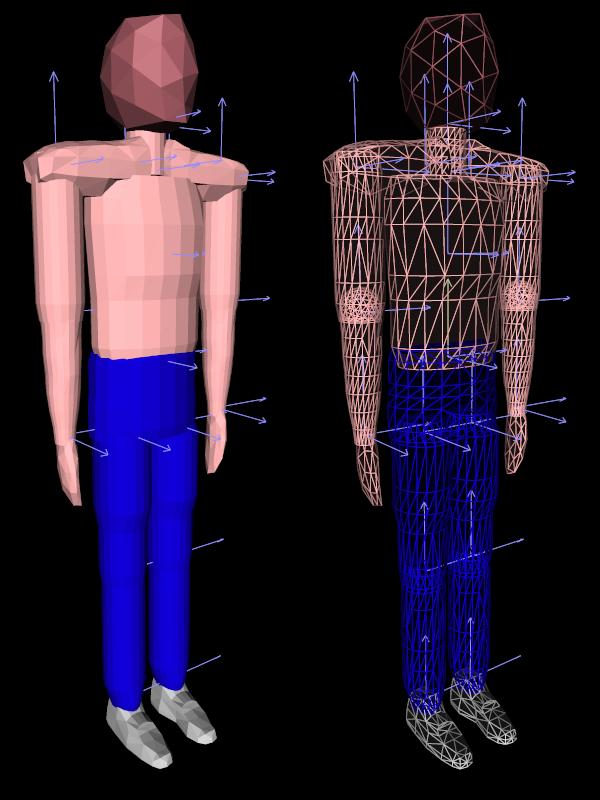
The images show two H-Anim models in VRML format, which can be loaded
and viewed by openSG.
For tracking in real-time all 180 degrees of freedom in the MPEG-4 body
model are not necessary. Additionally the geometry of the models should
be as simple as possible for fast processing of visible points,
building correspondences etc.
Therefore
we made a simple body model ourselve, that has 39 degrees of freedom,
as shown on the right. The amount of triangles is also greatly
reduced as compared to the one on the left.
The possible movement capabilities are shown as arrows,
each arrow represents a rotational joint axis. The key of our approach
is, that the motion can be described by rotational angles around known
axes sufficiently.
|
|
|
|
Model
Fitting
To
track the motion of a specific person, it is necessary in our approach
to have a model of the person that fits as good as possible. We
developed a fitting algorithm that estimates scale values for
each body part from a template model. The fitting is necessary for each
person. We are using only one single camera (see publications: Human
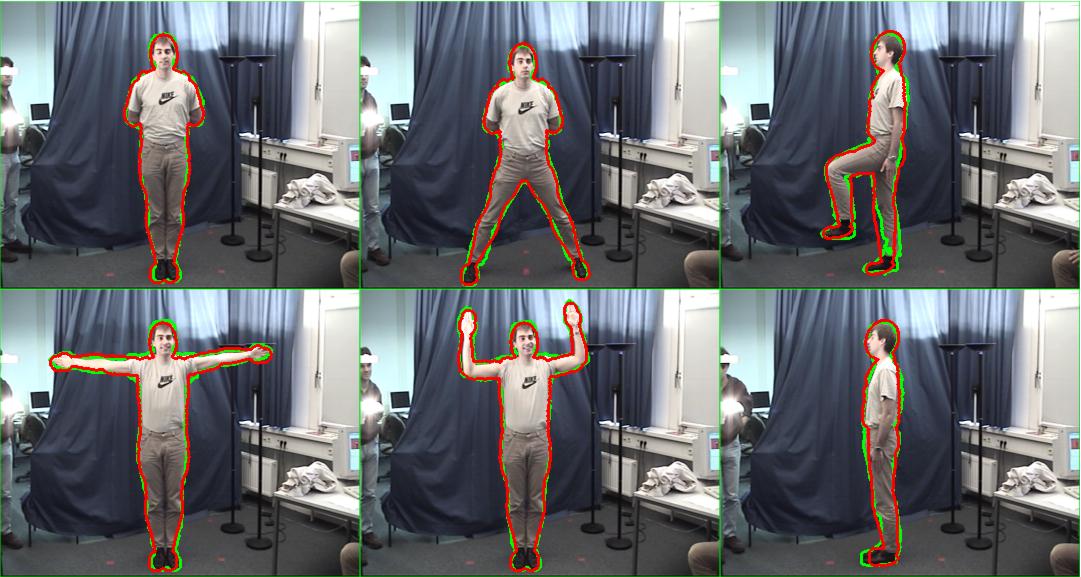
Model Fitting from Monocular Posture Images).
To overcome the the lack of depth information (single camer), the
person has to
strike six different postures as shown on the right. The approach is based
on silhouette information and minimizes differences between model and
template silhouettes by non-linear least squares minimization
solved with the Levenberg-Marquardt method(up to 100 parameters). The
optimization estimates parameters for all 6 images simultaneously.
|
|
|
|